Abstract
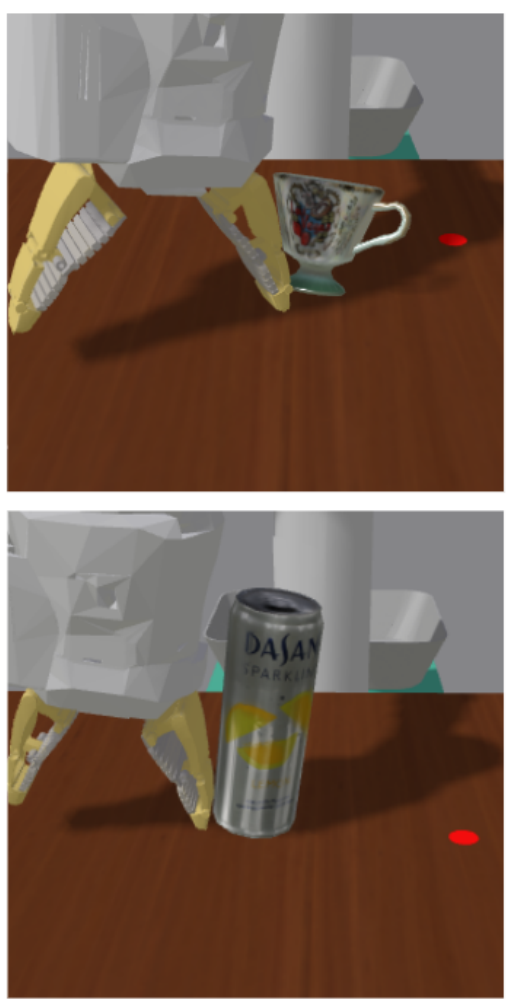
General contact-rich manipulation problems are long-standing challenges in robotics due to the difficulty of understanding complicated contact physics. Deep reinforcement learning (RL) has shown great potential in solving robot manipulation tasks. However, existing RL policies have limited adaptability to environments with diverse dynamics properties, which is pivotal in solving many contact-rich manipulation tasks. In this work, we propose Contact-aware Online COntext Inference (COCOI), a deep RL method that encodes a context embedding of dynamics properties online using contact-rich interactions. We study this method based on a novel and challenging non-planar pushing task, where the robot uses a monocular camera image and wrist force torque sensor reading to push an object to a goal location while keeping it upright. We run extensive experiments to demonstrate the capability of COCOI in a wide range of settings and dynamics properties in simulation, and also in a sim-to-real transfer scenario on a real robot.